立创天空星GD32开发板 开源嵌入式组件移植测试GCC-Makefile-Pyocd工程模板建立
立创开发板 开源嵌入式组件移植测试 GCC Makefile Pyocd 工程模板建立
Windows环境搭建参考
一、本次环境搭建所用的软硬件
1)Windows or Linux (本文以Windows为主,linux基本环境流程差不多,可能需要修改部分Makefile代码)
2)JLink、Daplink、Wch-Link烧录器
3)GNU Arm Embedded Toolchain交叉编译器
4)Mingw-w64 GCC for Windows 64
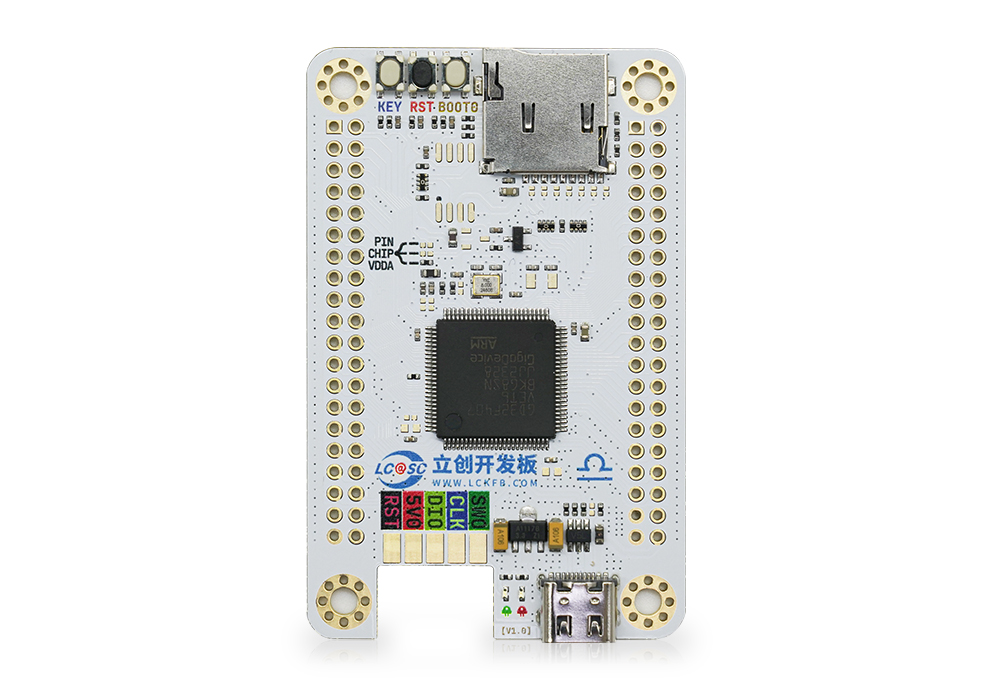
5)GD32F407VET6 立创开发板
二、软件安装配置
GNU Arm Embedded Toolchain交叉编译器
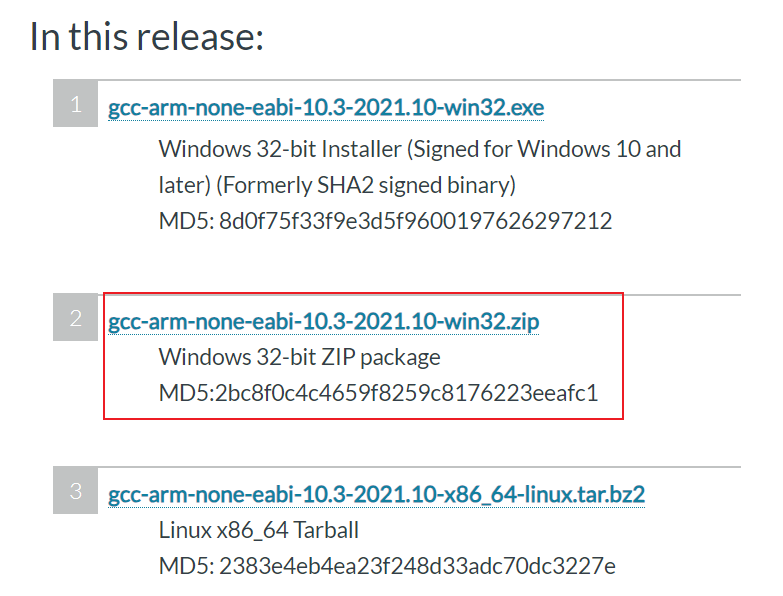
进入arm开发者官网,往下滑动选择下载解压可用的ZIP压缩包文件
下载链接: Downloads | GNU Arm Embedded Toolchain Downloads – Arm Developer
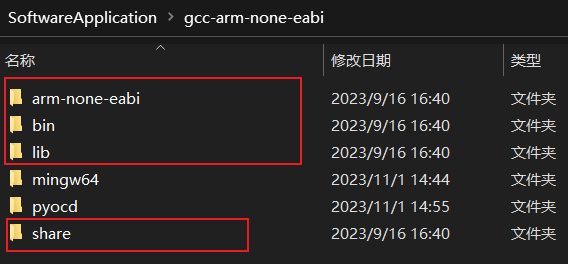
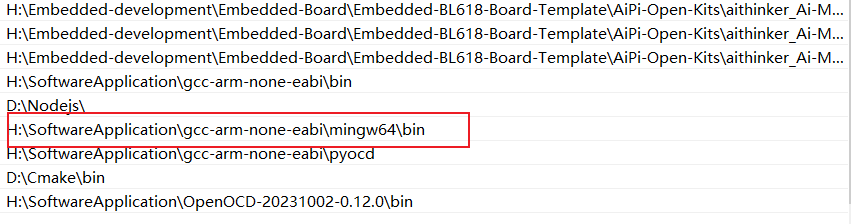
将下载好的压缩包文件解压在gcc-arm-none-eabi”文件夹中,并记住文件内“bin”文件的路径,后续需添加到系统环境变量Path中。
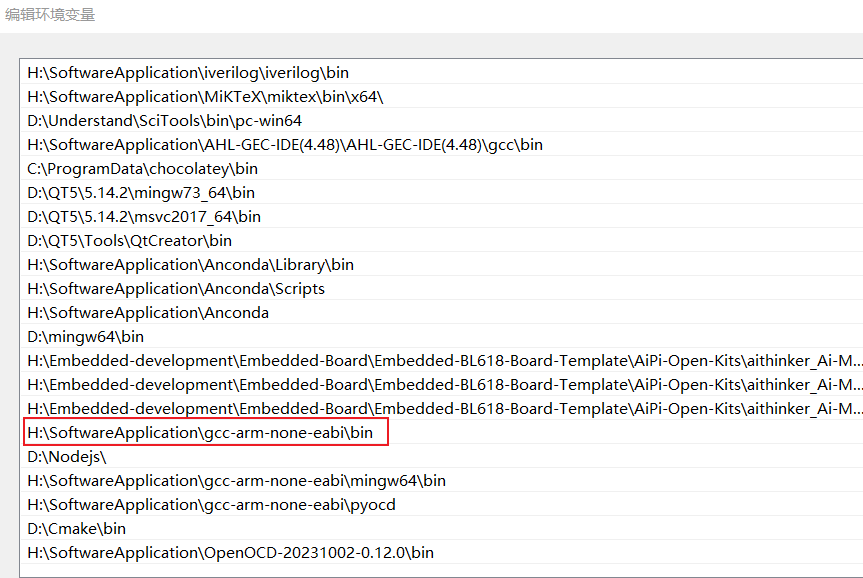
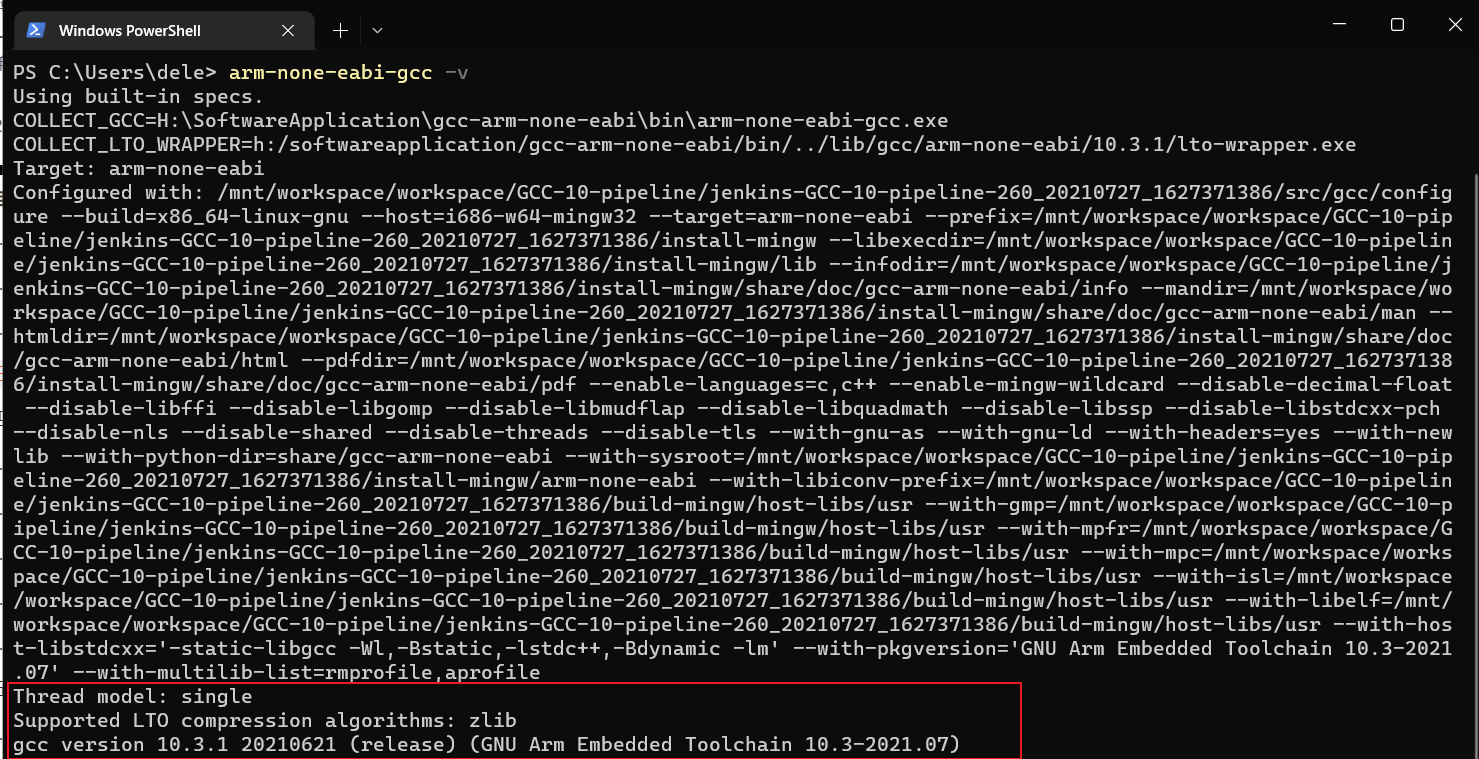
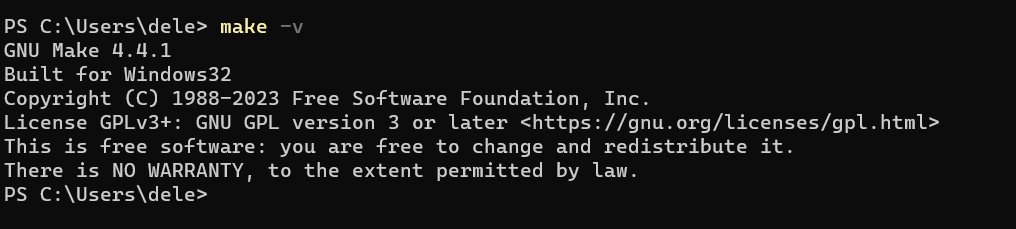
添加完环境变量后,进行测试,检测是否安装好。
安装Mingw-w64 GCC
点击链接进入到SourceForge官网,往下翻可以找到很多版本的下载链接,选择红色框内型号即可,不同前后缀的具体差异请参考:
MinGW gcc下载链接及sjlj、dwarf、seh异同以及gcc安装_AMDDMA的博客-CSDN博客_seh和sjlj
下载链接:
MinGW-w64 - for 32 and 64 bit Windows - Browse Files at SourceForge.net

同样,将下载好的文件解压到“gcc-arm-none-eabi”文件夹下,记住目录下的“bin”文件路径
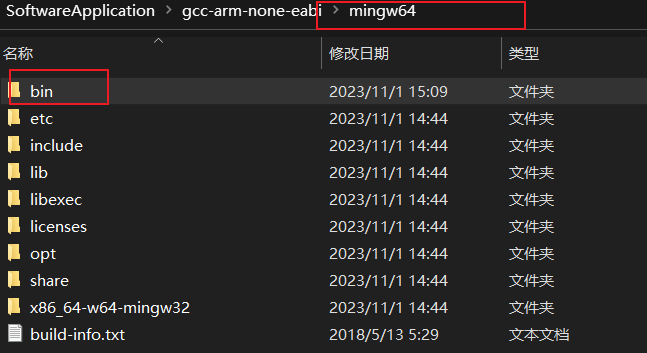
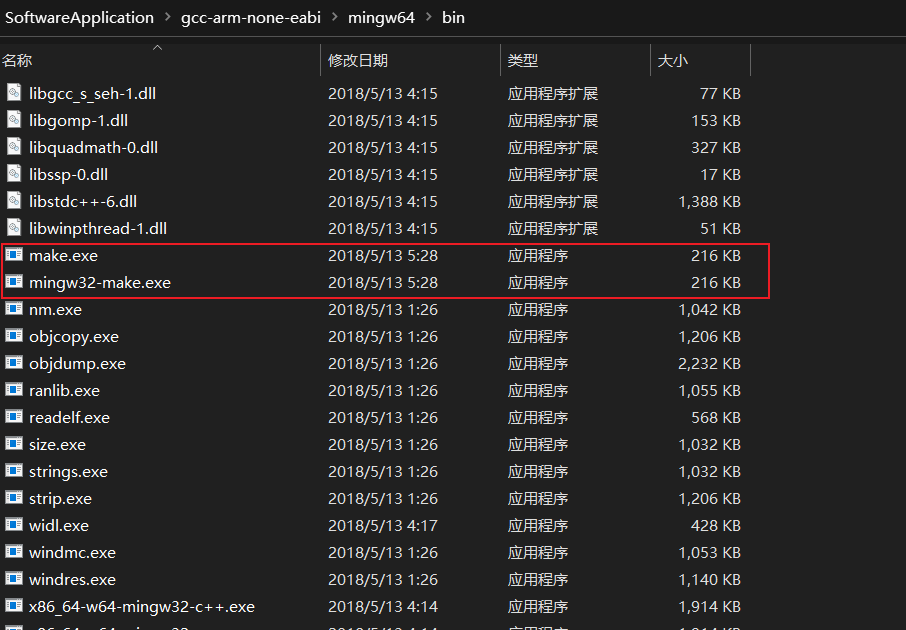
进入“bin”文件内找到“mingw32-make”应用程序文件,复制一份并重命名为“make”。这么做有利于在命令行执行make指令,而不是输入mingw32-make。
添加完环境变量后,进行测试,检测是否安装好。
3. 安装PyOCD
pyocd学习教程 https://www.cnblogs.com/halin/p/15169658.html
pip install -i https://pypi.tuna.tsinghua.edu.cn/simpl pyocd

综上所述,基本的软件环境已经配置好。
三、GD32F407-GCC-Template工程配置
工程结构
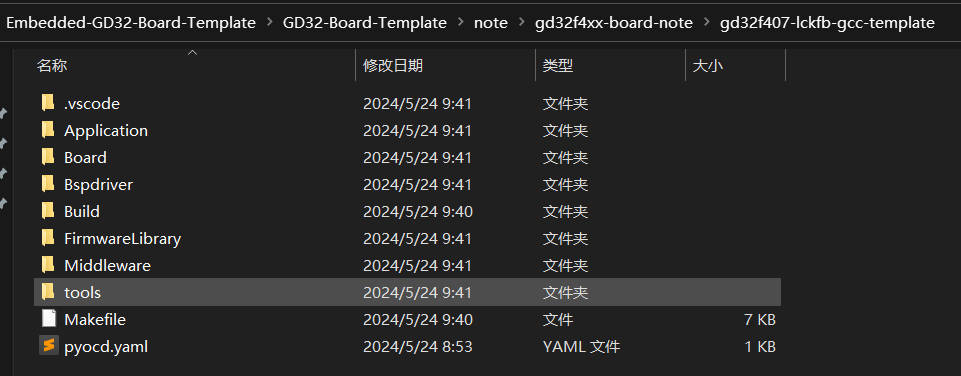
- Application
- Board
- Bspdriver
- FirmwareLibrary
FirmwareLibrary/CMSIS/
FirmwareLibrary/GD32F4xx_standard_peripheral
FirmwareLibrary/Ld
- Build
//编译过程输出文件
- tools
GigaDevice.GD32F4xx_DFP.3.2.0.pack
- Makefile
Makefile脚本文件,重点,构建全流程脚本Makefile文件编写(重点)
######################################
# target
######################################
TARGET = gd32f407vet6-lckfb-gcc-template
######################################
# building variables
######################################
# debug build?
DEBUG = 1
# optimization for size
OPT = -Os
#######################################
# paths
#######################################
# Build path
BUILD_DIR = Build
######################################
# source
######################################
# C sources
C_SOURCES = \
FirmwareLibrary/GD32F4xx_standard_peripheral/Source/gd32f4xx_adc.c \
FirmwareLibrary/GD32F4xx_standard_peripheral/Source/gd32f4xx_can.c \
FirmwareLibrary/GD32F4xx_standard_peripheral/Source/gd32f4xx_crc.c \
FirmwareLibrary/GD32F4xx_standard_peripheral/Source/gd32f4xx_ctc.c \
FirmwareLibrary/GD32F4xx_standard_peripheral/Source/gd32f4xx_dac.c \
FirmwareLibrary/GD32F4xx_standard_peripheral/Source/gd32f4xx_dbg.c \
FirmwareLibrary/GD32F4xx_standard_peripheral/Source/gd32f4xx_dci.c \
FirmwareLibrary/GD32F4xx_standard_peripheral/Source/gd32f4xx_dma.c \
FirmwareLibrary/GD32F4xx_standard_peripheral/Source/gd32f4xx_enet.c \
FirmwareLibrary/GD32F4xx_standard_peripheral/Source/gd32f4xx_exmc.c \
FirmwareLibrary/GD32F4xx_standard_peripheral/Source/gd32f4xx_exti.c \
FirmwareLibrary/GD32F4xx_standard_peripheral/Source/gd32f4xx_fmc.c \
FirmwareLibrary/GD32F4xx_standard_peripheral/Source/gd32f4xx_fwdgt.c \
FirmwareLibrary/GD32F4xx_standard_peripheral/Source/gd32f4xx_gpio.c \
FirmwareLibrary/GD32F4xx_standard_peripheral/Source/gd32f4xx_i2c.c \
FirmwareLibrary/GD32F4xx_standard_peripheral/Source/gd32f4xx_ipa.c \
FirmwareLibrary/GD32F4xx_standard_peripheral/Source/gd32f4xx_iref.c \
FirmwareLibrary/GD32F4xx_standard_peripheral/Source/gd32f4xx_misc.c \
FirmwareLibrary/GD32F4xx_standard_peripheral/Source/gd32f4xx_pmu.c \
FirmwareLibrary/GD32F4xx_standard_peripheral/Source/gd32f4xx_rcu.c \
FirmwareLibrary/GD32F4xx_standard_peripheral/Source/gd32f4xx_rtc.c \
FirmwareLibrary/GD32F4xx_standard_peripheral/Source/gd32f4xx_sdio.c \
FirmwareLibrary/GD32F4xx_standard_peripheral/Source/gd32f4xx_spi.c \
FirmwareLibrary/GD32F4xx_standard_peripheral/Source/gd32f4xx_syscfg.c \
FirmwareLibrary/GD32F4xx_standard_peripheral/Source/gd32f4xx_timer.c \
FirmwareLibrary/GD32F4xx_standard_peripheral/Source/gd32f4xx_tli.c \
FirmwareLibrary/GD32F4xx_standard_peripheral/Source/gd32f4xx_trng.c \
FirmwareLibrary/GD32F4xx_standard_peripheral/Source/gd32f4xx_usart.c \
FirmwareLibrary/GD32F4xx_standard_peripheral/Source/gd32f4xx_wwdgt.c \
FirmwareLibrary/CMSIS/GD/GD32F4xx/Source/system_gd32f4xx.c \
Application/main.c \
Board/board.c \
Bspdriver/bsp_uart.c \
Bspdriver/bsp_led.c \
Middleware/multi_button.c \
Middleware/stimer.c \
# ASM sources
ASM_SOURCES = FirmwareLibrary/CMSIS/GD/GD32F4xx/Source/GCC/startup_gd32f407_427.S
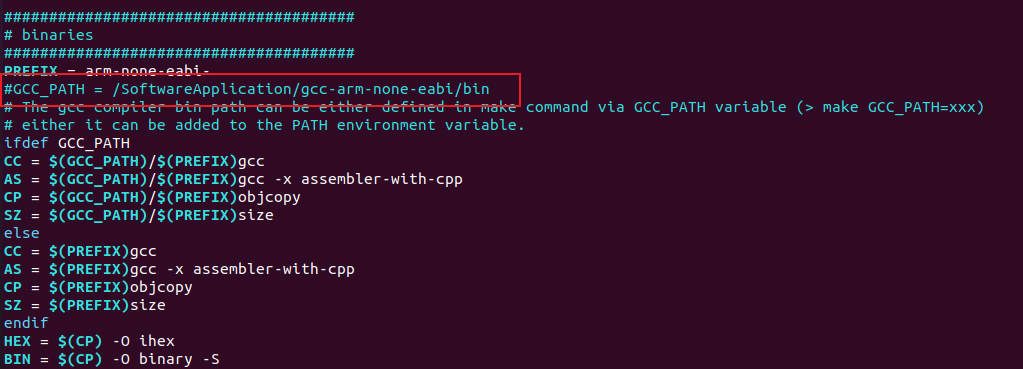
#######################################
# binaries
#######################################
PREFIX = arm-none-eabi-
GCC_PATH = /SoftwareApplication/gcc-arm-none-eabi/bin
ifdef GCC_PATH
CC = $(GCC_PATH)/$(PREFIX)gcc
AS = $(GCC_PATH)/$(PREFIX)gcc -x assembler-with-cpp
CP = $(GCC_PATH)/$(PREFIX)objcopy
SZ = $(GCC_PATH)/$(PREFIX)size
else
CC = $(PREFIX)gcc
AS = $(PREFIX)gcc -x assembler-with-cpp
CP = $(PREFIX)objcopy
SZ = $(PREFIX)size
endif
HEX = $(CP) -O ihex
BIN = $(CP) -O binary -S
#######################################
# CFLAGS
#######################################
# cpu
CPU = -mcpu=cortex-m4
# fpu
FPU = -mfpu=fpv4-sp-d16
# float-abi
FLOAT-ABI = -mfloat-abi=hard
# mcu
MCU = $(CPU) -mthumb $(FPU) $(FLOAT-ABI)
# macros for gcc
# AS defines
AS_DEFS =
# C defines
C_DEFS = \
-DUSE_STDPERIPH_DRIVER \
-DGD32F407
# AS includes
AS_INCLUDES =
# C includes
C_INCLUDES = \
-IFirmwareLibrary/GD32F4xx_standard_peripheral/Include \
-IFirmwareLibrary/CMSIS/Include \
-IFirmwareLibrary/CMSIS/GD/GD32F4xx/Include/ \
-IFirmwareLibrary/CMSIS \
-IMiddleware \
-IBspdriver \
-IApplication \
-IBoard \
# compile gcc flags
ASFLAGS = $(MCU) $(AS_DEFS) $(AS_INCLUDES) $(OPT) -Wall -fdata-sections -ffunction-sections
CFLAGS = $(MCU) $(C_DEFS) $(C_INCLUDES) $(OPT) -Wall -fdata-sections -ffunction-sections
ifeq ($(DEBUG), 1)
CFLAGS += -g -gdwarf-2
endif
# Generate dependency information
CFLAGS += -MMD -MP -MF"$(@:%.o=%.d)"
#######################################
# LDFLAGS
#######################################
# link script
LDSCRIPT = FirmwareLibrary/Ld/Link.ld
# libraries
LIBS = -lc -lm -lnosys
LIBDIR =
LDFLAGS = $(MCU) -u_printf_float -specs=nosys.specs -T$(LDSCRIPT) $(LIBDIR) $(LIBS) -Wl,-Map=$(BUILD_DIR)/$(TARGET).map,--cref -Wl,--gc-sections
# default action: build all
all: $(BUILD_DIR)/$(TARGET).elf $(BUILD_DIR)/$(TARGET).hex $(BUILD_DIR)/$(TARGET).bin
#######################################
# build the application
#######################################
# list of objects
OBJECTS = $(addprefix $(BUILD_DIR)/,$(notdir $(C_SOURCES:.c=.o)))
vpath %.c $(sort $(dir $(C_SOURCES)))
# list of ASM program objects
OBJECTS += $(addprefix $(BUILD_DIR)/,$(notdir $(ASM_SOURCES:.S=.o)))
vpath %.S $(sort $(dir $(ASM_SOURCES)))
$(BUILD_DIR)/%.o: %.c Makefile | $(BUILD_DIR)
@echo "[CC] $<"
@$(CC) -c $(CFLAGS) -Wa,-a,-ad,-alms=$(BUILD_DIR)/$(notdir $(<:.c=.lst)) $< -o $@
$(BUILD_DIR)/%.o: %.S Makefile | $(BUILD_DIR)
@echo "[AS] $<"
@$(AS) -c $(CFLAGS) $< -o $@
$(BUILD_DIR)/$(TARGET).elf: $(OBJECTS) Makefile
@echo "[HEX] $< -> $@"
@$(CC) $(OBJECTS) $(LDFLAGS) -o $@
@$(SZ) -A $@
$(BUILD_DIR)/%.hex: $(BUILD_DIR)/%.elf | $(BUILD_DIR)
@echo "[HEX] $< -> $@"
@$(HEX) $< $@
$(BUILD_DIR)/%.bin: $(BUILD_DIR)/%.elf | $(BUILD_DIR)
@echo "[BIN] $< -> $@"
@$(BIN) $< $@
$(BUILD_DIR):
@mkdir $@
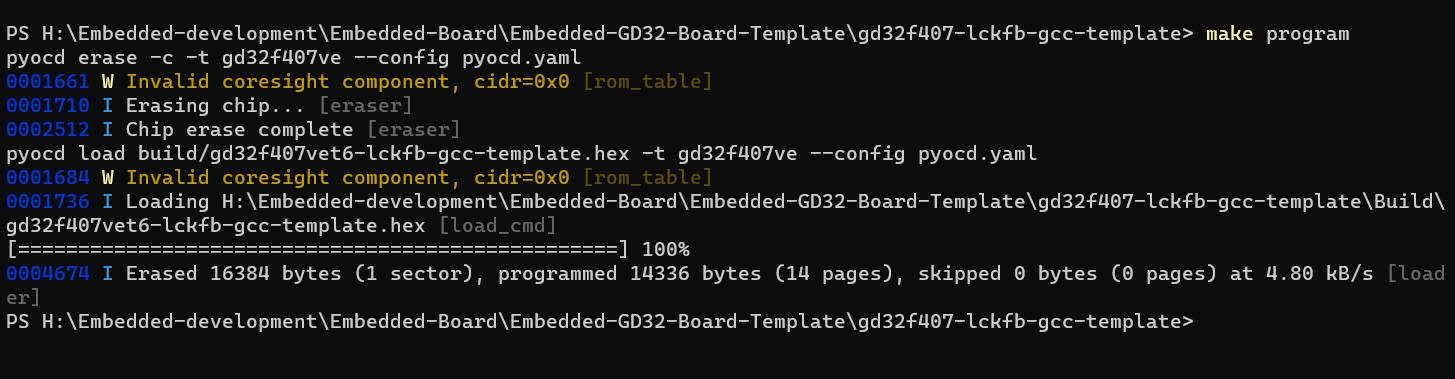
#######################################
# program
#######################################
program:
pyocd erase -c -t gd32f407ve --config pyocd.yaml
pyocd load build/$(TARGET).hex -t gd32f407ve --config pyocd.yaml
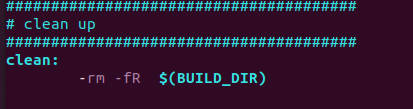
#######################################
# clean up
#######################################
clean:
-del /q $(BUILD_DIR)
#######################################
# dependencies
#######################################
-include $(wildcard $(BUILD_DIR)/*.d)
# *** EOF ***Linux环境搭建
安装GNU Arm Embedded Toolchain交叉编译器
进入arm开发者官网,往下滑动选择下载解压可用的ZIP压缩包文件 ,选择linux版本
也可以直接在linux系统中下载,这里使用的Ubuntu 22.04
sudo apt-get install gcc-arm-none-eabi下载完成查看
arm-none-eabi-gcc -v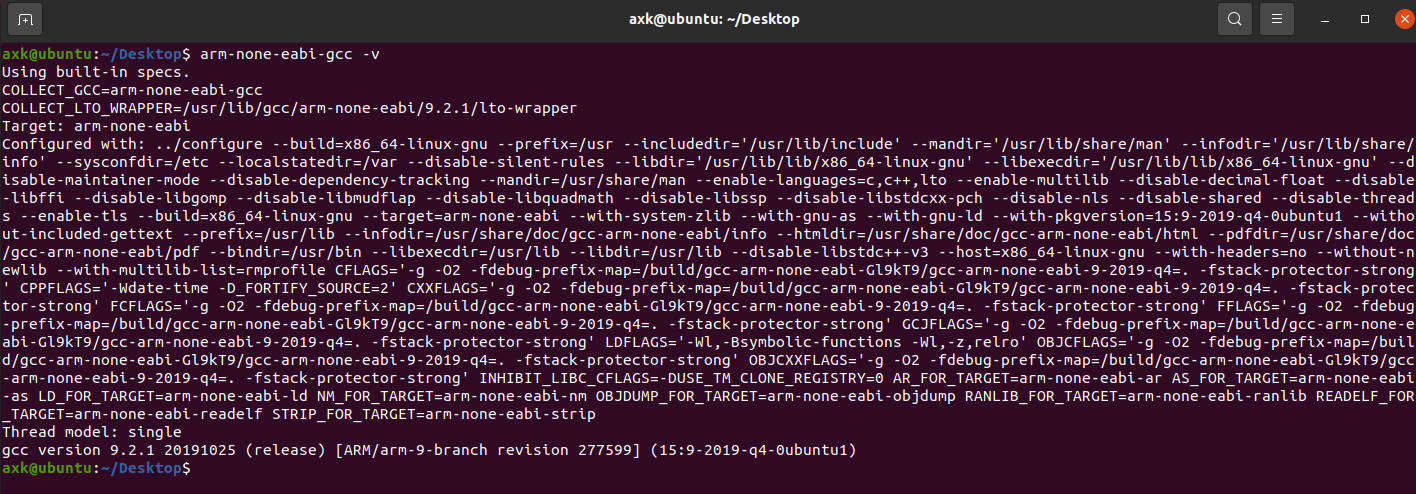
修改Makefile
注释GCC_PATH
修改 clean命令
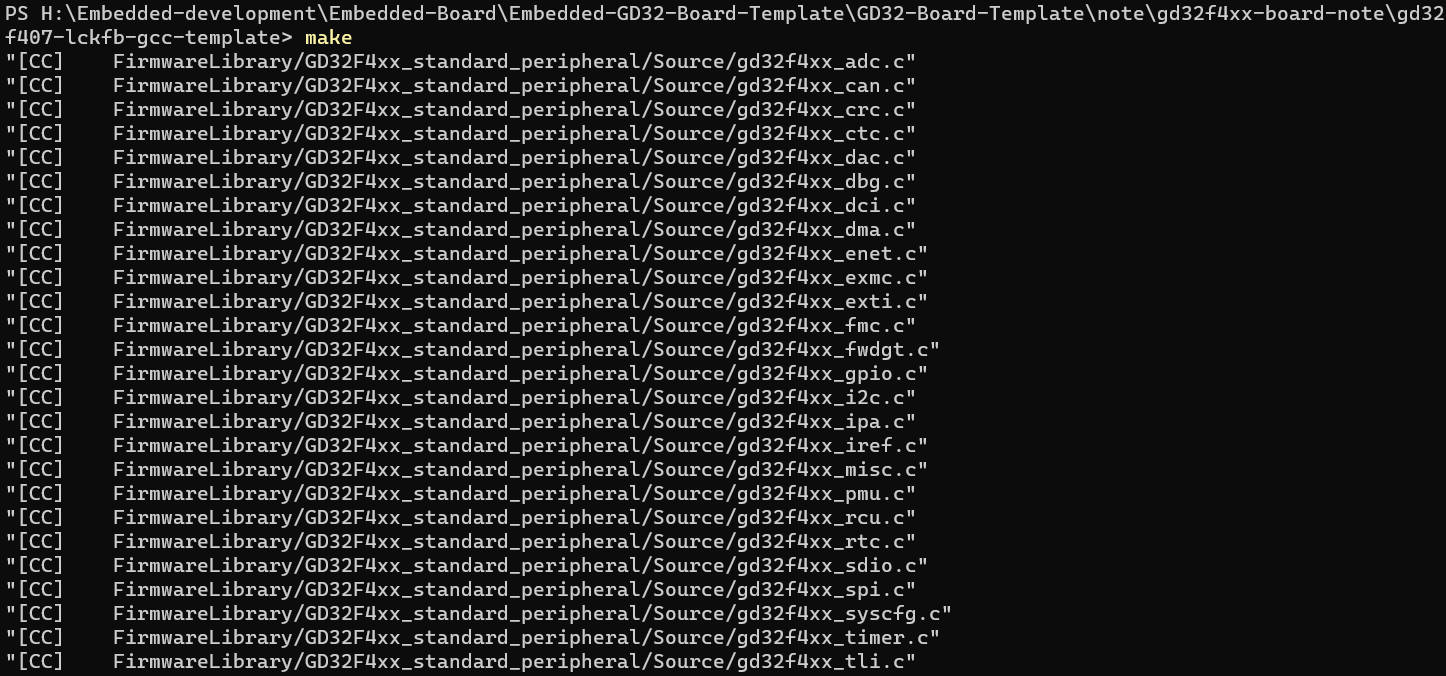
四、工程测试
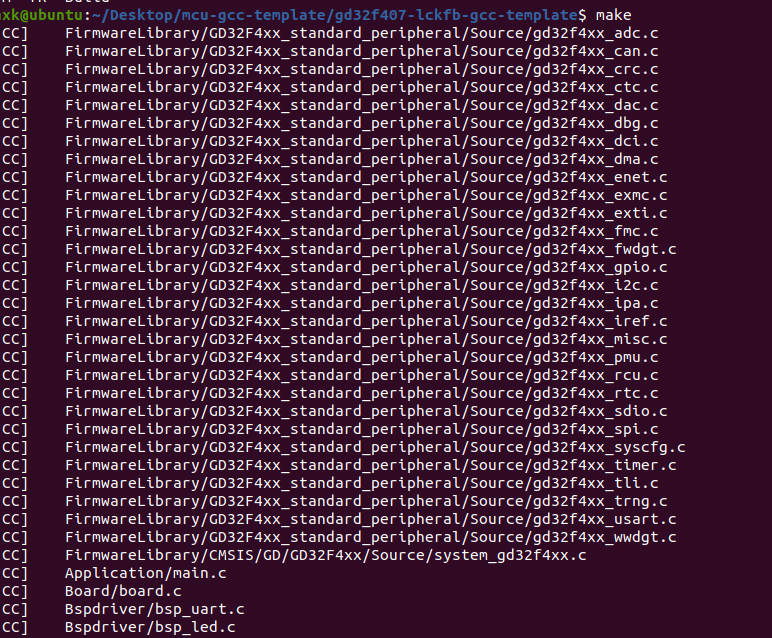
make 构建工程

make program pyocd
接上串口线,打开串口软件,查看终端输出情况(如果是从MDK-Keil工程移植过来,printf应该是不支持的,因此终端没有输出,需要修改相关代码,后面写修改文件)(图片中的情况是修改之后的效果)

注意修改的部分
uart printf重定向问题
//重定向c库函数printf到串口,重定向后可使用printf函数
// int fputc(int ch, FILE *f)
// {
// /* 发送一个字节数据到串口 */
// usart_data_transmit(COM_UART[0], (uint8_t) ch);
// /* 等待发送完毕 */
// while (usart_flag_get(COM_UART[0], USART_FLAG_TBE) == RESET);
// return (ch);
// }
int _write (int fd, char *pBuffer, int size)
{
for (int i = 0; i < size; i++)
{
usart_data_transmit(COM_UART[0], (uint8_t)pBuffer[i]);
while(RESET == usart_flag_get(COM_UART[0], USART_FLAG_TBE));
}
return size;
}Linux平台测试